Roboat: autonoom varen in stedelijke binnenwateren
Ynse Deinema is co-founder en CEO van Roboat. De startup uit Amsterdam komt voort uit een onderzoeksproject van Massachusetts Institute of Technology en het Amsterdam Institute for Advanced Metropolitan Studies. De vraag was toen: hoe kunnen we transport in de stad efficiënter maken, en kunnen we dan slim gebruikmaken van de bestaande infrastructuur in Amsterdam? De focus lag op de grachten. Ynse: “Dit was het vertrekpunt van Roboat: zelf-varende vaartuigen die 24/7 geruisloos een nieuwe manier van binnenstedelijk transport konden verzorgen. Nu focussen we met onze bedrijf op het digitaliseren van processen aan boord van binnenvaartschepen, met een focus op veerponten. ”

Ynse is van huis uit geen engineer, hij heeft psychobiologie gestudeerd. Door zijn interesse in technologie en innovatie is hij echter steeds meer in de robotica terecht gekomen. En sinds 2019 werkt hij met zijn team van 12 FTE aan Roboat. “Het transporteren van mensen en goederen wordt wereldwijd steeds moeilijker. Steden worden steeds voller en veel overheden maken beleid om meer transport over het water te faciliteren. Dit wringt, want tegelijkertijd is er een groeiend personeelstekort in de binnenvaart en bestaan er zorgen over veiligheid op de steeds drukker wordende vaarwegen”.
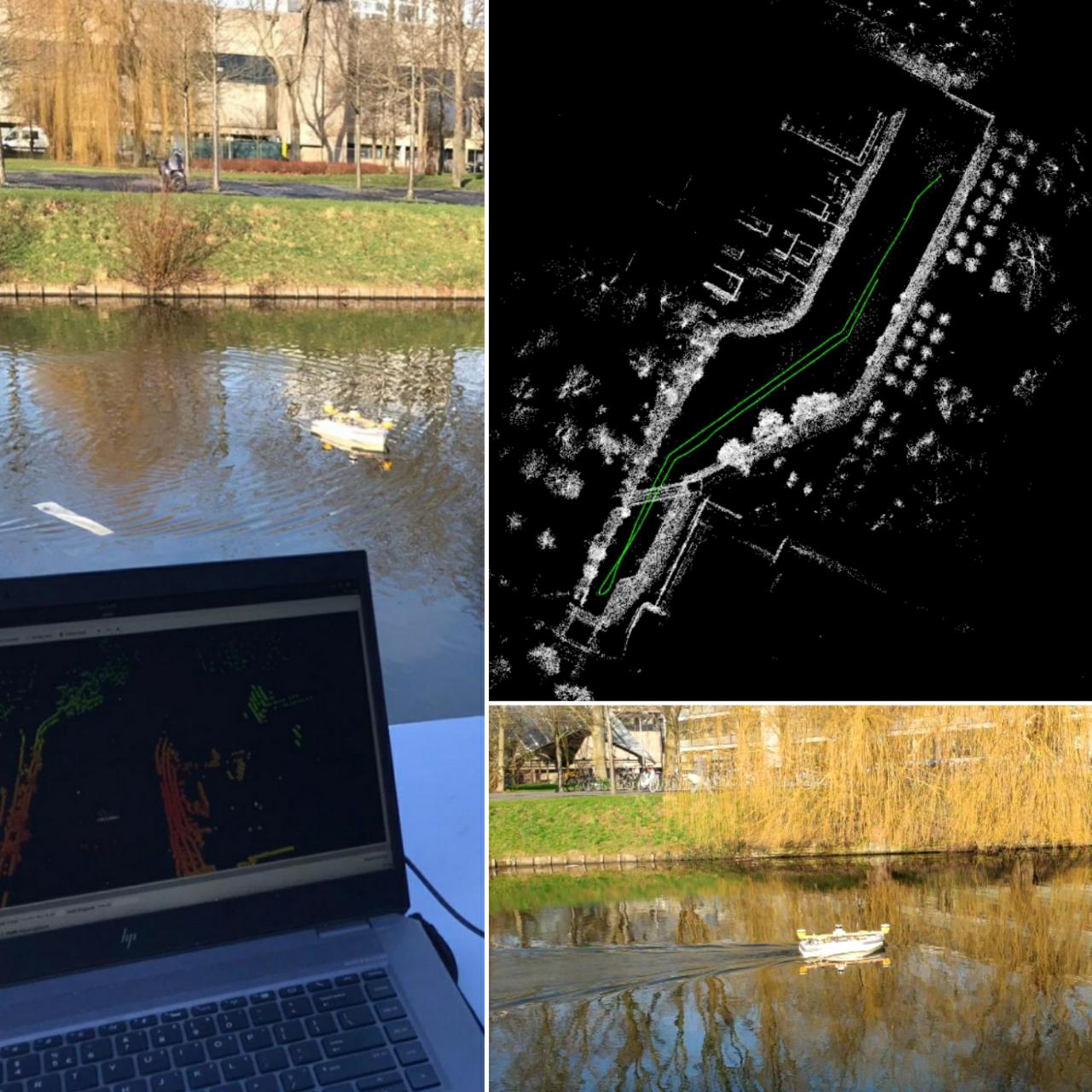
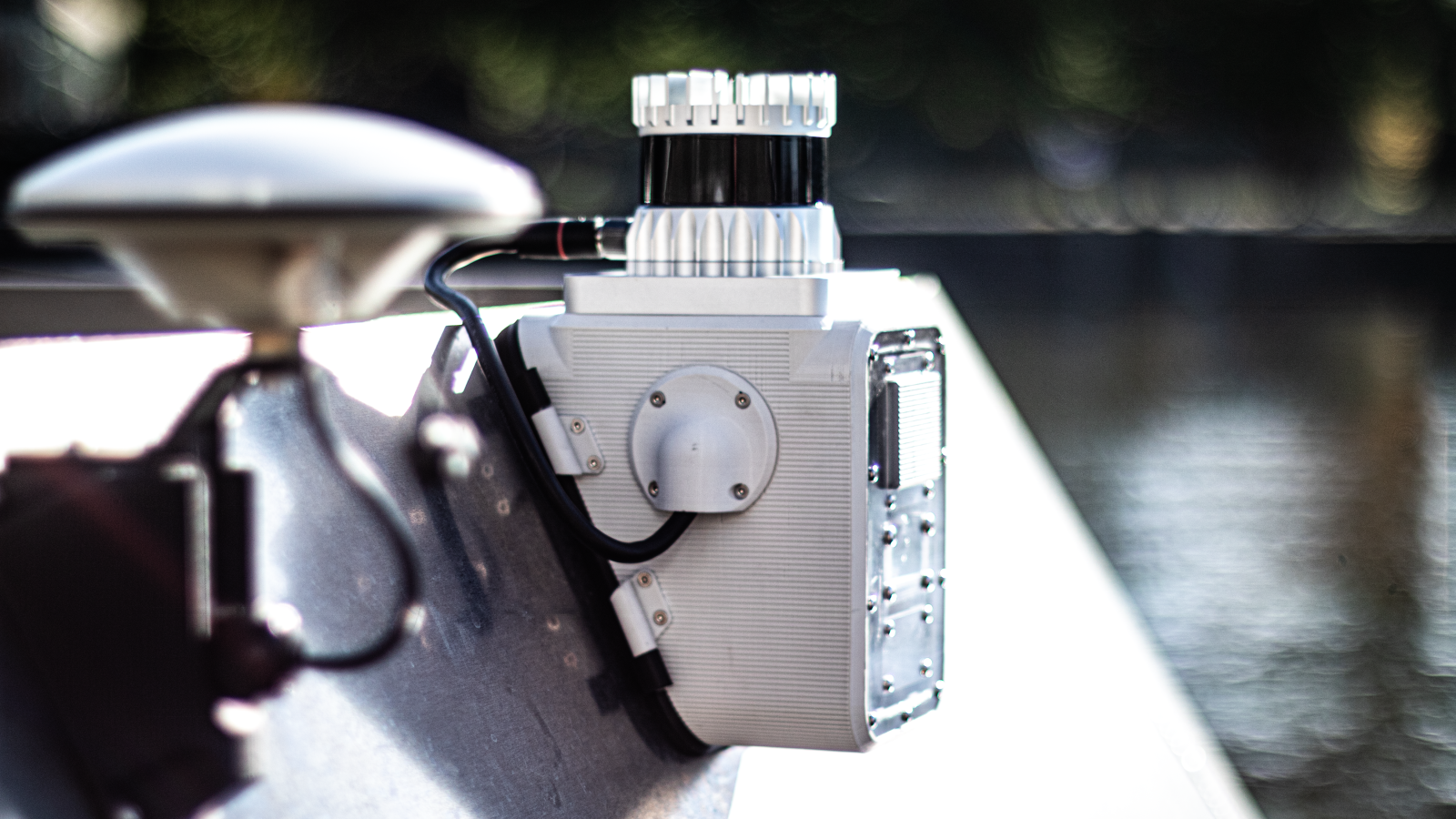
Op die problemen speelt Roboat in. “We maken een autonomiesysteem dat geschikt is voor de binnenwateren. Dat begint met het verzamelen van digitale data aan boord van het schip. Hiermee kan je al een bijdrage leveren aan de efficiëntie van de operatie door bijvoorbeeld inzicht te geven in het gebruik van de aandrijflijn of meer precieze ETA informatie voor veerponten. Een volgende stap is het introduceren van digitale sensoren die de buitenwereld in kaart brengen, zoals camera en lidar. Op die manier kan je een heel precies beeld schetsen van de omgeving, om bijvoorbeeld schippers te assisteren met af- en aanmeren, of het herkennen van objecten en gevaarlijke situaties. Het is ook mogelijk om de aandrijflijn aan te spreken zodat het systeem actief het schip kan besturen. Je kunt technisch gezien nu al een volledig onbemand schip laten varen, maar dat is niet altijd wenselijk”.
Een duidelijke focus
Roboat is een startup. Daarom hebben ze ervoor gekozen om – voor nu – een duidelijke focus te kiezen. “Ik sluit niet uit dat we in de toekomst naar ander soort waterwegen gaan kijken’’, vertelt Ynse. “Maar voor nu zien we de grootste marktkans in de binnenwateren in stedelijk gebied.’’
Hoe uit zich dat in de praktijk? “We zetten vooral in op stadsveerponten. Die gaan vaak van A naar B, en weer terug naar A. De context waarin het schip opereert is hierdoor redelijk controleerbaar. Dat maakt het realistischer om sneller een hogere mate van autonomie te kunnen implementeren.’’
Kleinere schepen economisch rendabel
“Er is een trend gaande dat alles alsmaar groter moet. Dit heeft er gedeeltelijk mee te maken dat het anders financieel niet zo interessant is. Wat ik interessant vind, is dat je door autonome navigatie bij kunt dragen aan het weer economisch rendabel maken van kleinere schepen. En daardoor bijvoorbeeld ook vaartuigen die ondieper liggen, waardoor je met minder water alsnog kunt varen.’’ Voor nu is dit nog toekomstmuziek, vertelt Ynse. “Er zijn nog flink wat stappen die gezet moeten worden voordat we daar zijn. Nu zijn we vooral bezig met het ondersteunen van schippers.’’
Ynse: “We hebben nu een systeem dat je vrij laagdrempelig kunt installeren. Zo kun je een eerste stap zetten in de wereld van autonome navigatie zonder dat je een enorm grote investering hoeft te doen. Het is behapbaar en niet direct heel uitgebreid en duur.’’
Wil je meer weten over Roboat en de lopende projecten? Kijk dan op https://roboat.tech/