Prototyping Autonomy for Smart Mooring
How can the benefits of autonomy be brought to the most human-exposed and time-critical step of inland shipping – mooring – without redesigning ports and barges? At the Researchlab Autonomous Shipping (RAS) of the TU Delft, postdoctoral researcher Javier García Martín has been working on this challenge over the past year within the autonomous e-barge and transhipment work package of the MAGPIE Project. One of the central focus of the project is the development and validation of the Kiss & Ride concept for autonomous inland shipping – an idea borrowed from urban transport: arrive, “kiss” the quay, transfer, and “ride” for leave, fast and predictably. As one of the most important operations of the Kiss & Ride concept, mooring today remains a critical bottleneck: it is labour-intensive, highly sensitive to local conditions, and difficult to standardize. To address smart and autonomous mooring, the research at the RAS aims to develop a framework integrating collaborative planning protocols, algorithms for autonomous docking and collision avoidance, and both model-scale and pilot-scale demonstrations of container transshipment between terminals.
Challenge
Within this framework, Javier has also contributed to the education of the Master track Multi-Machine Engineering (MME) at TU Delft, where he challenged MSc students to design, develop, and demonstrate innovative Kiss & Ride solutions. Through integrated design projects, Javier guided students’ training in hands-on prototyping and research-driven innovation, linking academic learning with real-world challenges in autonomous shipping. More specifically, two project teams presented their complementary concepts that fit the mentioned idea – arrive, berth, transfer, depart – while keeping people away from the snap-back zone and preserving existing terminal layouts.
Team 1

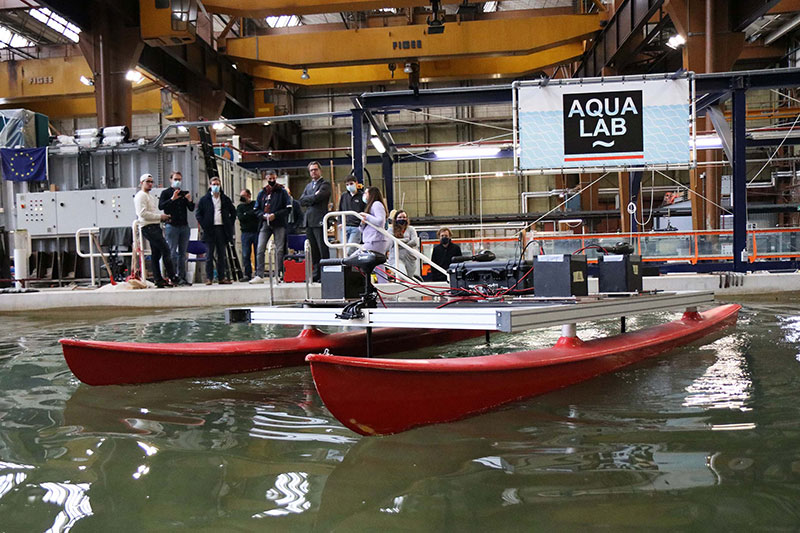
The first team designed two modular floating helpers, one forward and one aft, that push and hold a barge safely against the quay during the Kiss & Ride window. Each helper is a compact L-shaped platform equipped with azimuth thrusters for all-directional control and a battery-electric powertrain to keep local emissions at zero. In operation, the pair acts like robotic tug-fenders: they approach the barge, align with its hull, apply gentle and distributed thrust, and maintain a controlled contact so that the vessel can be positioned precisely for cargo operations. A few choices make this approach attractive for pilots. The helpers rely only on contact and control without requiring rails, magnets or bespoke fittings on the quay or the hull. The structure is modular using barge sections that can be configured to size, and the drive and energy packages can be containerized for straightforward maintenance or swap. During the demonstrations in the RAS the 1:50 models executed approach and push-to-hold manoeuvres cleanly, validating the choreography and the controller logic at scale. For longer holds, the design includes a winch-assisted mode to reduce energy consumption, and the team put early work into “safe release” sequences so an abnormal event does not cascade into an incident. The result is a helper that does one thing consistently well – accurate and repeatable positioning – without adding complexity to the terminal.
Team 2
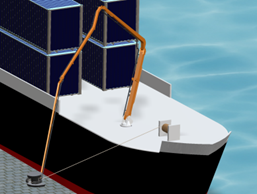
The second team tackled the complementary problem: placing and tensioning lines autonomously from the vessel side. The solution, nicknamed MAGgrip, combines a long-reach folding arm with a soft, adaptive end-effector and a deck winch. The arm’s task is limited to placing a pre-formed rope loop over a bollard or a mooring buoy. Once the loop is seated, the winch pulls the vessel in and keeps the line under controlled tension. Because the line – and not the arm – carries the mooring loads, the mechanical envelope on deck remains compact and the solution stays universal: the same loop can be placed on bollards with different heads and geometries.The soft gripper is the enabling detail. Built from a silicone structure with internal pneumatic chambers, it stiffens slightly when pressurized to shape and stabilize the loop as the arm approaches the target, and relaxes once the loop is in place so the rope bears the load directly. Demonstrations showed that the prototype gripper placed loops reliably on several bollard shapes.
Viewed together, the two concepts, the L-shaped modular floating helpers and the MAGgrip, cover the full Kiss & Ride envelope. The quay-side helpers take care of approach, contact and holding in mooring, delivering predictable berthing conditions on demand. The MAGgrip places and tensions lines from the vessel side, taking crew off the quay edge and standardizing the most variable part of the process.
Would you like to learn more about RAS and what they do? Visit https://rasdelft.nl/ or contact y.pang@tudelft.nl and r.r.negenborn@tudelft.nl.